
Robô autônomo é desenvolvido em projeto de iniciação científica na UFTM

O protótipo de um robô autônomo encontra-se em estágio avançado de desenvolvimento na UFTM, resultado de um projeto de iniciação científica sob a coordenação do professor Vinícius Abrao da Silva Marques e com a participação da aluna bolsista Wanessa Karoline Oliveira Silva, ambos vinculados ao curso de graduação em Engenharia Mecânica. O robô é desenvolvido no laboratório D3 do Instituto de Ciências Tecnológicas e Exatas (ICTE), na Unidade Univerdecidade da Instituição. O projeto conta com apoio financeiro e institucional do CNPq (Conselho Nacional de Desenvolvimento Científico e Tecnológico) que fomenta atividades de pesquisa científica e tecnológica no Brasil.
O principal objetivo do projeto é integrar as tecnologias de navegação autônoma dos robôs AMRs (Autonomous Mobile Robots) com a mobilidade avançada dos robôs omnidirecionais (plataformas móveis capazes de se deslocar em qualquer direção no plano horizontal sem a necessidade de rotação para mudar de direção), por meio da construção de um protótipo de baixo custo, resultando em um robô autônomo com alta flexibilidade de movimento. A proposta visa aprofundar o conhecimento em robótica móvel inteligente e explorar suas possíveis aplicações em cenários reais.
Sobre o robô autônomo
Robôs AMRs (Autonomous Mobile Robots), diferentemente dos AGVs (Automated Guided Vehicles), utilizam sensores avançados, câmeras e algoritmos de inteligência artificial para mapear e se locomover de forma autônoma em diferentes ambientes. Os pesquisadores explicam que não dependem de uma infraestrutura física fixa, como trilhos ou fitas magnéticas, e são capazes de ajustar suas rotas em tempo real, adaptando-se a mudanças no ambiente ou nas prioridades das tarefas.
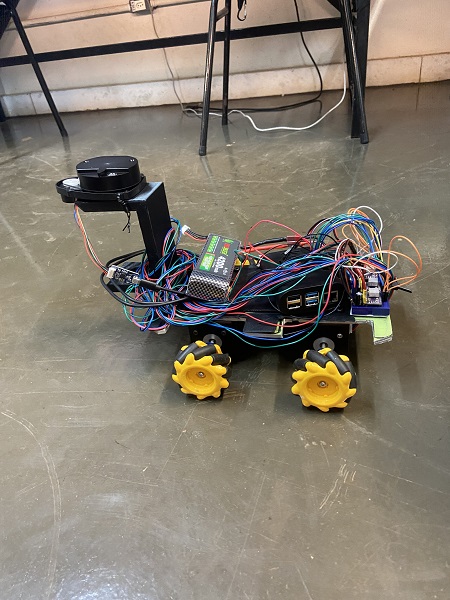
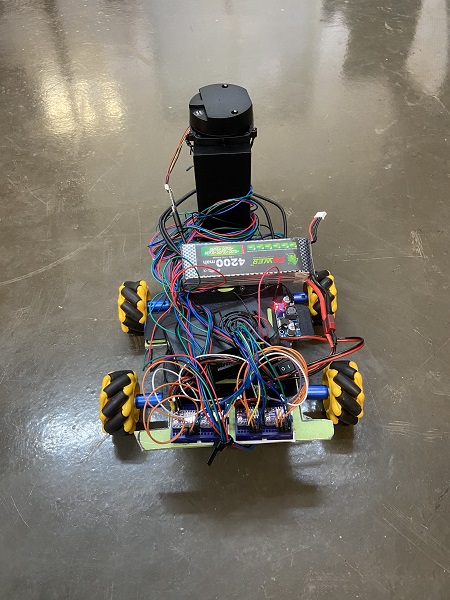
O robô desenvolvido neste projeto combina essa inteligência de navegação com a mobilidade aprimorada dos robôs omnidirecionais. Esse tipo de robô é capaz de se mover livremente em qualquer direção, incluindo deslocamentos para frente, para trás, lateralmente e rotações completas, sem a necessidade de alterar a orientação do corpo principal. Essa característica é possível graças ao uso de rodas especiais, como as rodas Mecanum, que possibilitam manobras com alta precisão e agilidade mesmo em espaços reduzidos.
“Na prática, esse tipo de robô apresenta grande potencial de aplicação em ambientes que demandam transporte eficiente e seguro de materiais, como centros logísticos, hospitais, armazéns e linhas de produção industrial. Ele pode ser utilizado em tarefas como separação e movimentação de pedidos, entregas internas e suporte logístico em tempo real. Em hospitais, por exemplo, pode realizar a entrega automatizada de medicamentos, amostras e materiais entre setores, contribuindo para maior agilidade e organização no atendimento”, explicou a bolsista Wanessa.
Os testes realizados com o robô desenvolvido na UFTM evidenciaram um desempenho eficiente tanto na movimentação omnidirecional quanto no controle autônomo, confirmando a eficácia das etapas de modelagem, simulação e integração dos sistemas embarcados.
“Para os alunos, o projeto oferece uma oportunidade prática de aplicar conhecimentos em programação, robótica, eletrônica e inteligência artificial, além de desenvolver habilidades em pesquisa científica e inovação. Para a Instituição, o desenvolvimento fortalece as linhas de pesquisa em tecnologia avançada, amplia o portfólio de projetos de iniciação científica e pode gerar publicações e parcerias com o setor produtivo”, comentou o docente orientador.
Wanessa conta que participar deste projeto tem sido uma experiência transformadora. “Trabalhar no desenvolvimento de um robô autônomo omnidirecional me permitiu aplicar na prática tudo o que aprendi em sala de aula, além de explorar novas áreas como inteligência artificial, sensoriamento e controle. É muito gratificante ver a evolução do protótipo e saber que essa tecnologia pode ter um impacto real em ambientes industriais e logísticos. Sem dúvida, essa vivência tem sido essencial para minha formação acadêmica e profissional, e algo que me enriqueceu profundamente enquanto aluna de graduação. Além disso, ter a oportunidade de trabalhar com o professor Vinícius Abrão é extremamente enriquecedor. Ele é um profissional com grande conhecimento e dedicação, e tenho muita admiração e orgulho por fazer parte de um projeto orientado por ele”, concluiu.
De acordo com os pesquisadores, inicialmente o robô tem fins de pesquisa, mas após a finalização, ele poderá ser aprimorado para aplicações reais em ambientes industriais ou logísticos, bem como ser usado como plataforma de testes e desenvolvimento para futuros projetos de automação e inteligência artificial na própria Universidade.
Imagens: Arquivo Pessoal de Wanessa Karoline Oliveira Silva
Redes Sociais